
RideSafeUM: un projecte per millorar la seguretat i fomentar l’ús de la micromobilitat
10 d'octubre de 2022
X-ClimPlan: illa de calor urbana i onades de calor. Com adaptar les nostres ciutats al canvi climàtic?
27 d'octubre de 2022SARAS: Cap a la robòtica cognitiva en cirurgia
En l’actualitat, durant una intervenció quirúrgica laparoscòpica assistida per robot, es requereixen diverses unitats de personal mèdic en el quiròfan: el cirurgià principal que teleopera el robot quirúrgic, el cirurgià assistent que li assisteix i el personal d'infermeria.
Sota aquest paradigma s’ha desenvolupat SARAS (Smart Autonomous Robot Assistant Surgeons), un projecte en el qual ha participat el grup de Robòtica i Visió del Centre de Recerca en Enginyeria Biomèdica (CREB) de la UPC.
Millorar l’eficiència i dotar d’un sistema cognitiu autònom les unitats de cirurgia R-MIS
En el marc de SARAS, s’han creat sistemes robòtics quirúrgics d’última generació que permeten a un sol cirurgià executar una cirurgia robòtica de mínima invasió (en anglès, Robotic Minimally Invasive Surgery - R-MIS) sense la necessitat d'un cirurgià assistent expert, augmentant així l'eficiència dels recursos econòmics i socials d'un hospital i garantint el mateix nivell de seguretat per als pacients.
El concepte de robot en el qual s’ha treballat consisteix en un sistema integral de cirurgia en solitari (solo-surgery system), mitjançant la integració de dos braços robòtics addicionals d'assistència (que assumeixen les tasques del cirurgià assistent) dotats d’autonomia, i un nucli d’intel·ligència artificial cognitiu i cooperatiu amb un sistema robòtic quirúrgic. Per aconseguir-ho, els robots auxiliars han de conèixer el procediment quirúrgic bàsic i poder interpretar en cada moment en quina fase del procés es troba per poder decidir quina actuació d’assistència cal realitzar, un cop s’hagi produït l’actuació del cirurgià principal. Aquests ajuts poden consistir tant en moure un òrgan com subjectar una agulla de sutura.
Aquest concepte ha requerit el desenvolupament de tecnologies específiques per a la seva implementació:
- El disseny d’un mòdul de percepció, que inferirà l'estat del procediment i les accions realitzades pel cirurgià que teleopera els braços robòtics o utilitza eines laparoscòpiques estàndards. Aquest també s’encarrega de comprendre la complexitat de l'àrea quirúrgica, reconstruint, etiquetant i rastrejant tots els seus elements segons l'observat pels sensors disponibles.
- El disseny d’un mòdul de control cognitiu que predigui els següents passos del procediment a partir de dades d'intervencions reals l'estructura de procediments laparoscòpics complexos per a identificar anomalies, comprendre les accions del cirurgià (consciència de la situació) i les seves necessitats futures (presa de decisions).
- El disseny d’una arquitectura de control de múltiples robots de baix nivell, en la qual les ordres d’alt nivell seran traçades en ordres per als braços robòtics. En aquest sentit, s’ha requerit el disseny d’un mòdul de planificació avançada i navegació capaç de traduir les decisions autònomes preses pel mòdul cognitiu en trajectòries apropiades per a les eines laparoscòpiques muntades en els braços robòtics d’assistència SARAS.
- El desenvolupament dels dos braços robòtics d'assistència, en substitució del cirurgià assistent, amb capacitat de dirigir les eines laparoscòpiques estàndards i específiques per al procediment clínic en particular.
La contribució tecnològica del CREB-UPC
El CREB de la UPC ha contribuït en el desenvolupament del sistema de control dels robots auxiliars que permetran assistir al cirurgià en cirurgia robòtica per teleoperació, suplint així les tasques auxiliars que normalment fa el cirurgià assistent.
La tasca que el CREB ha portat a terme en els quatre anys del projecte, s’ha centrat en verificar l’efectivitat assolida en un camp quirúrgic sintètic, com és una prostatectomia radical. La feina desenvolupada ha comportat modelitzar el procediment, establir les regles d’actuació i integrar-ho en el ‘DaVinci Research Kit’, una plataforma de teleoperació amb robot quirúrgic orientada a la recerca en tècniques d’assistència robòtica en cirurgia.
SARAS ha estat desenvolupat per un consorci integrat per la Universitat de Verona, Universitat de Modena, Universitat de Ferrara, Ospedale San Raffaele de Milà, Universitat de Dundee, Universitat de Brookes, Medineering Surgical Robotics i ACMIT Austrian Center i la Universitat Politècnica de Catalunya (UPC), a través del grup de Robòtica i Visió del CREB. SARAS ha estat finançat pel programa Horizon 2020 Research and Innovation amb una dotació total de 4.225.000 €, dels quals 410.000 € han finançat la tasca del CREB.
Més informació en el lloc web oficial del projecte.
-
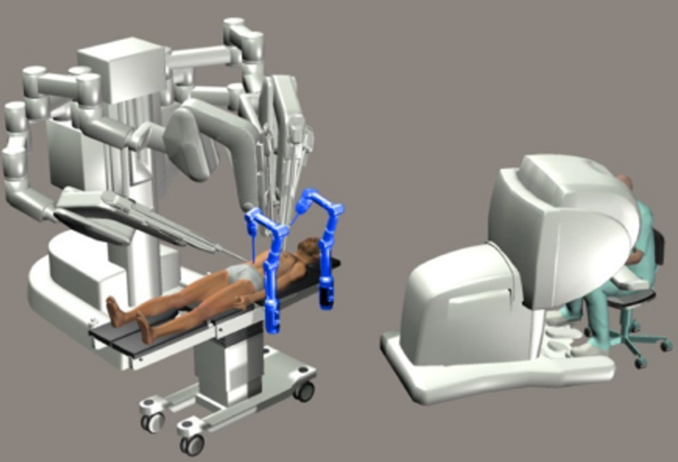
- © The SARAS Project – Platform SARAS SOLO-SURGERY
-

- © The SARAS Project – Platform SARAS LAPARO2.0-SURGERY
Sector
Vols saber més?
Projectes Relacionats
- Un equip de grup de recerca Bioinspired Oral Biomaterials and Interfaces (BOBI) del Departament de Ciència i Enginyeria de Materials (CEM) de la Universitat Politècnica de Catalunya - BarcelonaTech (UPC) participa en el projecte europeu HYDROHEAL, el qual investiga com transformar el tractament de fractures òssies mitjançant l’ús de biomaterials intel·ligents i avançats, per reduir els riscos d'infecció i rebuig d'implants i els temps de recuperació de les fractures.
- Les malalties neurodegeneratives, com la malaltia de Parkinson, l'Alzheimer i les malalties relacionades amb l'edat, han estat àmpliament estudiades a causa del seu gran impacte en les persones i la societat. Fins ara, són malalties incurables i debilitants que produeixen una degeneració progressiva i la mort de les cèl·lules nervioses, amb un consegüent deteriorament cognitiu i de la mobilitat. Els tremolors, principalment en repòs, la lentitud dels moviments (bradiquinesi), la rigidesa de les extremitats i els problemes de marxa i equilibri són els trastorns motors típics de la malaltia de Parkinson. A més, a causa de l'atròfia progressiva dels músculs, aquests problemes poden provocar caigudes, la qual cosa comporta més complicacions i riscos per a la qualitat de vida.
- El grup de recerca en Biomaterials, Biomecànica i Enginyeria de Teixits (BBT) de l'Institut de Recerca i Investigació en Salut (IRIS) de la Universitat Politècnica de Catalunya – BarcelonaTech (UPC) treballa en DYNAMIC, un projecte que té com a objectiu crear biomaterials multifuncionals sensibles a estímuls, capaços no només d’afavorir la regeneració òssia, sinó també de combatre infeccions bacterianes de manera intel·ligent i controlada.
- El Grup d'Identificació per Radiofreqüència i Electrònica Flexible (RFLEX) de la Universitat Politècnica de Catalunya - BarcelonaTech (UPC) participa en el projecte TELEBREATH, amb l'objectiu de contribuir a una millor atenció a la demanda de cures de llarga durada en col·lectius vulnerables, com ara gent gran i persones dependents.




{kind=link}
{kind=link}
{kind=link}
{kind=link}