
RideSafeUM: A project to improve safety and encourage the use of micromobility
October 10, 2022
X-ClimPlan: urban heat islands and heat waves. How to adapt our cities to climate change?
October 27, 2022SARAS: Towards cognitive robotics in surgery
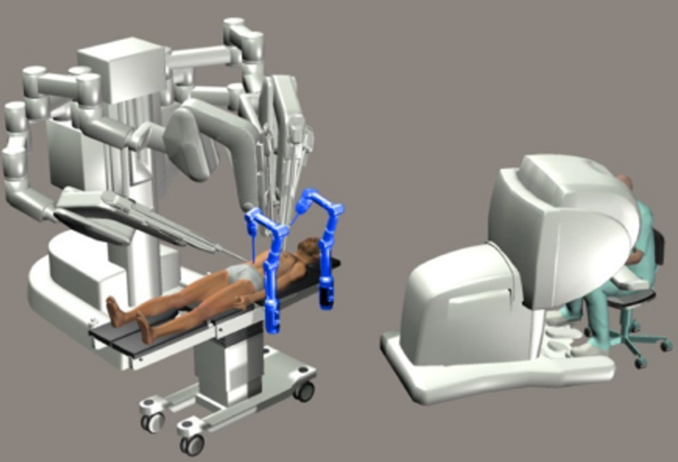
Currently, during a laparoscopic or robot-assisted surgical procedure, several units of medical personnel are requested in the operating room: the main surgeon who tele-operates the surgical robot, the assistant surgeon who supports the main surgeon, and nursing staff.
Under this paradigm, SARAS (Smart Autonomous Robot Assistant Surgeons) has been developed, a project in which the Robotics and Vision group of the Research Centre for Biomedical Engineering (CREB) of the UPC has participated.
Improve efficiency and provide an autonomous cognitive system for robotic minimally invasive surgery (R-MIS)
As part of SARAS, next-generation surgical robotic systems have been created so that a single surgeon can execute robotic minimally invasive surgery (R-MIS) without the need of an expert assistant surgeon. This increases the efficiency of the social and economic resources of a hospital and guarantees the same safety level for patients.
The concept of robot that has been worked on consists of an integral solo-surgery system, through the integration of two additional assistive robotic arms (which assume the tasks of assistant surgeon) that are autonomous, and a cognitive and cooperative artificial intelligence core with a surgical robotic system. To achieve this, the auxiliary robots have to learn the basic surgical procedure. They must be able to determine which phase of the process is being carried out, so that they can decide which assistance action must be undertaken once the action of the main surgeon has been completed. This assistance could consist in moving an organ or holding a suture needle.
The concept required the development of specific technologies for its implementation:
- The design of a perception module, which will infer the state of the procedure and the actions carried out by the surgeon who tele-operates the robotic arms or uses standard laparoscopic instruments. This module is also responsible for understanding the complexity of the surgical area by reconstructing, labelling and tracking all of its elements as observed by the available sensors.
- The design of a cognitive control model that predicts the following steps in the procedure based on data on real interventions in the structure of complex laparoscopic procedures to identify anomalies, understand the surgeon’s actions (awareness of the situation) and their future needs (decision making).
- The design of a low-level control architecture for multiple robots, in which high-level orders are outlined in orders for the robotic arms. This required the design of an advanced planning and navigation module that could translate the autonomous decisions made by the cognitive module into the appropriate trajectories for the laparoscopic tools mounted on SARAS assistive robotic arms.
- The development of the two assistive robotic arms, instead of the assistant surgeon, with a capacity to guide the standard and specific laparoscopic instruments for the clinical procedure.
The technological contribution of CREB-UPC
The CREB of the UPC has contributed to the development of the assistive robot control system to assist the surgeon in robotic tele-operation surgery. This system replaces the auxiliary tasks that are usually carried out by the assistant surgeon.
The task that CREB has carried out in the four years of the project has focused on verifying the effectiveness achieved in the synthetic surgical field, like a radical prostatectomy. The work carried out involved modelling the procedure, establishing the rules of action and integrating it into the ‘DaVinci Research Kit’, a tele-operation platform that is focused on research into assistive robotics techniques in surgery.
SARAS has been developed by a consortium comprised of the University of Verona, the University of Modena, the University of Ferrara, San Raffaele Hospital of Milan, the University of Dundee, Brookes University, Medineering Surgical Robotics and ACMIT Austrian Center, and the Universitat Politècnica de Catalunya (UPC), through the Robotics and Vision group of CREB. SARAS has been funded by the Horizon 2020 Research and Innovation programme with a total amount of €4,225,000, of which €410,000 have funded the task of CREB.
Further information is available on the project’s official website.
-
- © The SARAS Project – Platform SARAS SOLO-SURGERY
-

- © The SARAS Project – Platform SARAS LAPARO2.0-SURGERY
Sector
You want to know more?
Related Projects
- A team from the Bioinspired Oral Biomaterials and Interfaces (BOBI) research group at the Department of Materials Science and Engineering (CEM) of the Universitat Politècnica de Catalunya - BarcelonaTech (UPC) is taking part in the European project HYDROHEAL, which explores how to transform bone fracture treatment using smart and advanced biomaterials, aiming to reduce the risk of infection and implant rejection, as well as shortening fracture recovery times.
- Neurodegenerative diseases, such as Parkinson's disease, Alzheimer's, and age-related disorders, have been widely studied due to their significant impact on individuals and society. So far, these are incurable and debilitating diseases that lead to progressive degeneration and death of nerve cells, resulting in cognitive and mobility impairments. Tremors, mainly at rest, slowness of movement (bradykinesia), limb rigidity, and issues with gait and balance are typical motor disorders related to Parkinson’s disease. Additionally, due to progressive muscle atrophy, these issues can lead to falls, which in turn result in further complications and risks to quality of life.
- The Biomaterials, Biomechanics, and Tissue Engineering (BBT) Research Group at the Institute for Health Research and Innovation (IRIS) of the Universitat Politècnica de Catalunya – BarcelonaTech (UPC) is leading DYNAMIC, a project aimed at creating multifunctional, stimuli-responsive biomaterials that not only promote bone regeneration but also intelligently and effectively combat bacterial infections.
- 30/09/2024Project Headerrightno-repeat;left top;;auto20px A team from the Centre for Research in Biomedical Engineering (CREB) of the UPC and Sant Joan de Déu has created a new […]



{kind=link}
{kind=link}
{kind=link}
{kind=link}