
RideSafeUM: un proyecto para mejorar la seguridad y fomentar el uso de la micromovilidad
octubre 11, 2022
X-ClimPlan: isla de calor urbana y olas de calor. ¿Cómo adaptar nuestras ciudades al cambio climático?
octubre 27, 2022SARAS: Hacia la robótica cognitiva en cirugía
En la actualidad, durante una intervención quirúrgica laparoscópica asistida por robot, se requieren varias unidades de personal médico en el quirófano: el cirujano principal que teleopera el robot quirúrgico, el cirujano asistente que le asiste y el personal de enfermería.
Bajo este paradigma se ha desarrollado SARAS (Smart Autonomous Robot Assistant Surgeons), un proyecto en el cual ha participado el grupo de Robótica y Visión del Centro de Investigación en Ingeniería Biomédica (CREB) de la UPC.
Mejorar la eficiencia y dotar de un sistema cognitivo autónomo las unidades de cirugía R-MIS
En el marco de SARAS, se han creado sistemas robóticos quirúrgicos de última generación que permiten a un solo cirujano ejecutar una cirugía robótica de mínima invasión (en inglés, Robotic Minimally Invasive Surgery - R-MIS) sin la necesidad de un cirujano asistente experto, aumentando así la eficiencia de los recursos económicos y sociales de un hospital y garantizando el mismo nivel de seguridad para los pacientes.
El concepto de robot en el cual se ha trabajado consiste en un sistema integral de cirugía en solitario (solo-surgery system), mediante la integración de dos brazos robóticos adicionales de asistencia (que asumen las tareas del cirujano asistente) dotados de autonomía, y un núcleo de inteligencia artificial cognitivo y cooperativo con un sistema robótico quirúrgico. Para conseguirlo, los robots auxiliares tienen que conocer el procedimiento quirúrgico básico y poder interpretar en cada momento en qué fase del proceso se encuentra para poder decidir qué actuación de asistencia hay que realizar, una vez se haya producido la actuación del cirujano principal. Estas ayudas pueden consistir tanto en mover un órgano como sujetar una aguja de sutura.
Este concepto ha requerido el desarrollo de tecnologías específicas para su implementación:
- El diseño de un módulo de percepción, que inferirá el estado del procedimiento y las acciones realizadas por el cirujano que teleopera los brazos robóticos o utiliza herramientas laparoscópicas estándares. Este también se encarga de comprender la complejidad del área quirúrgica, reconstruyendo, etiquetando y rastreando todos sus elementos según el observado por los sensores disponibles.
- El diseño de un módulo de control cognitivo que prediga los siguientes pasos del procedimiento a partir de datos de intervenciones reales la estructura de procedimientos laparoscópicos complejos para identificar anomalías, comprender las acciones del cirujano (conciencia de la situación) y sus necesidades futuras (toma de decisiones).
- El diseño de una arquitectura de control de múltiples robots de bajo nivel, en la cual las órdenes de alto nivel serán trazadas en órdenes para los brazos robóticos. En este sentido, se ha requerido el diseño de un módulo de planificación avanzada y navegación capaz de traducir las decisiones autónomas tomadas por el módulo cognitivo en trayectorias apropiadas para las herramientas laparoscópicas montadas en los brazos robóticos de asistencia SARAS.
- El desarrollo de los dos brazos robóticos de asistencia, en sustitución del cirujano asistente, con capacidad de dirigir las herramientas laparoscópicas estándares y específicas para el procedimiento clínico en particular.
La contribución tecnológica del CREB-UPC
El CREB de la UPC ha contribuido en el desarrollo del sistema de control de los robots auxiliares que permitirán asistir al cirujano en cirugía robótica por teleoperación, supliendo así las tareas auxiliares que normalmente hace el cirujano asistente.
La tarea que el CREB ha llevado a cabo en los cuatro años del proyecto, se ha centrado en verificar la efectividad lograda en un campo quirúrgico sintético, como es una prostatectomía radical. El trabajo desarrollado ha comportado modelizar el procedimiento, establecer las reglas de actuación e integrarlo en el ‘DaVinci Research Kit’, una plataforma de teleoperación con robot quirúrgico orientada en la investigación en técnicas de asistencia robótica en cirugía.
SARAS ha sido desarrollado por un consorcio integrado por la Universidad de Verona, Universidad de Modena, Universidad de Ferrara, Ospedale San Raffaele de Milán, Universidad de Dundee, Universidad de Brookes, Medineering Surgical Robotics y ACMIT Austrian Center y la Universitat Politècnica de Catalunya (UPC), a través del grupo de Robótica y Visión del CREB. SARAS ha sido financiado por el programa Horizon 2020 Research and Innovation con una dotación total de 4.225.000 €, de los cuales 410.000 € han financiado la tarea del CREB.
Más información en el sitio web oficial del proyecto.
-
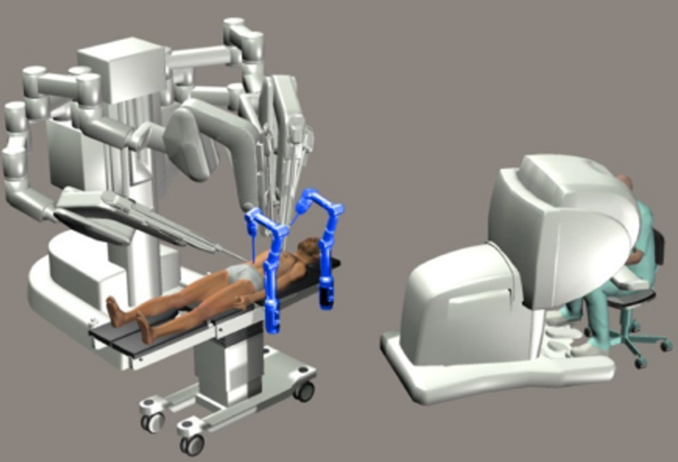
- © SARAS Project – SARAS SOLO-SURGERY platform
-

- © SARAS Project – SARAS LAPARO2.0-SURGERY platform
Sector
¿Quieres saber más?
Proyectos Relacionados
- Un equipo del grupo de investigación Bioinspired Oral Biomaterials and Interfaces (BOBI) del Departamento de Ciencia e Ingeniería de Materiales (CEM) de la Universitat Politècnica de Catalunya - BarcelonaTech (UPC) participa en el proyecto europeo HYDROHEAL, que investiga cómo transformar el tratamiento de fracturas óseas mediante el uso de biomateriales inteligentes y avanzados, con el objetivo de reducir los riesgos de infección y rechazo de implantes, así como el tiempo de recuperación de las fracturas.
- Las enfermedades neurodegenerativas, como la enfermedad de Parkinson, el Alzheimer y las enfermedades relacionadas con la edad, han sido ampliamente estudiadas debido a su gran impacto en las personas y la sociedad. Hasta ahora, se trata de enfermedades incurables y debilitantes que dan lugar a una degeneración progresiva y a la muerte de las células nerviosas, con un consiguiente resultado de deterioro cognitivo y de movilidad. Los temblores, principalmente en reposo, la lentitud de los movimientos (bradiquinesia), la rigidez de las extremidades y los problemas de marcha y equilibrio, son los típicos trastornos motores relativos a la enfermedad de Parkinson. Además, debido a la atrofia progresiva de los músculos, estos problemas pueden provocar caídas, lo que puede dar lugar a más complicaciones y riesgos para la calidad de vida.
- El grupo de investigación en Biomateriales, Biomecánica e Ingeniería de Tejidos (BBT) de l’Institut de Recerca i Investigació en Salut (IRIS) de la Universitat Politècnica de Catalunya – BarcelonaTech (UPC) trabaja en DYNAMIC, un proyecto cuyo objetivo crear biomateriales multifuncionales sensibles a estímulos que no solo ayuden a la regeneración ósea, sino que también puedan combatir infecciones bacterianas de forma inteligente y controlada.
- El Grupo de Identificación por Radiofrecuencia y Electrónica Flexible (RFLEX) de la Universitat Politècnica de Catalunya - BarcelonaTech (UPC) participa en el proyecto TELEBREATH, con el objetivo de contribuir a una mejor atención a la demanda de cuidados de larga duración en colectivos vulnerables, tales como ancianos y personas dependientes.




{kind=link}
{kind=link}
{kind=link}
{kind=link}