
WUITIPS: Soluciones de protección de infraestructuras turísticas contra incendios
mayo 2, 2025
OCEAN: Aplicación para la optimización del consumo energético en aparatos eléctricos de alto consumo
mayo 8, 202506/05/2025
El Centro de Investigación en Supervisión, Seguridad y Control Automático (CS2AC-UPC) de la Universitat Politècnica de Catalunya - BarcelonaTech (UPC) ha coordinado el proyecto SaCoAV, centrado en la investigación de nuevos métodos y herramientas para garantizar la coordinación segura de vehículos autónomos en entornos urbanos.
Los vehículos autónomos son sistemas complejos que deben funcionar de forma segura y coordinada en tiempo real, teniendo en cuenta la presencia de otros vehículos, personas, carreteras y obstáculos. Aunque los avances en este campo han conseguido grandes progresos en la seguridad y el control de vehículos autónomos individuales, la coordinación de varios vehículos autónomos sigue siendo un reto pendiente. El proyecto SaCoAV ha abordado esta problemática para hacer que esta coordinación sea más eficiente, reduciendo así el tráfico y la contaminación, y al mismo tiempo facilitando la implementación efectiva de soluciones de movilidad.
El proyecto ha combinado dos conceptos clave:
- Desarrollo de algoritmos para coordinar los movimientos y actividades de vehículos autónomos conectados en entornos urbanos.
- Integración de mecanismos de seguridad y ciberseguridad para garantizar el correcto funcionamiento de los vehículos ante errores, cambios imprevistos o ataques maliciosos en los enlaces de comunicación.
Más concretamente, en el marco del proyecto se ha logrado:
- Desarrollar algoritmos para coordinar múltiples vehículos, considerando aspectos de seguridad y ciberseguridad.
- Incorporar mecanismos de aprendizaje en las estrategias de coordinación desarrolladas.
- Crear algoritmos para detectar problemas de seguridad, incluidos eventos y fallos durante la coordinación.
- Desarrollar tecnologías para identificar vulnerabilidades en las comunicaciones derivadas de ataques cibernéticos.
- Proponer algoritmos que reconfiguren las acciones de coordinación frente a problemas de seguridad o ciberseguridad.
- Aplicar los algoritmos en escenarios realistas de coordinación, involucrando varios vehículos como drones, robots móviles y coches autónomos, en cooperación con otros equipos de investigadores expertos en la materia (colaboraciones nacionales e internacionales).
Impacto
SaCoAV ha permitido avanzar significativamente en el campo de la movilidad autónoma segura y coordinada, abordando uno de los principales retos actuales: la gestión colectiva y segura de múltiples vehículos autónomos en entornos urbanos complejos. El proyecto contribuirá a mejorar la eficiencia del tráfico, reducir la contaminación y aumentar la seguridad vial.
Presupuesto y financiación
En el proyecto participa un equipo formado por varios grupos de investigación de la UPC: Sistemas Avanzados de Control (SAC), el Centro de Investigación en Supervisión, Seguridad y Control Automático (CS2AC-UPC), el Centro de Investigación del Hidrógeno (CER-H2) y Sistemas Inteligentes de Control (SIC). SaCoAV ha contado con un presupuesto de 244.420€ y una duración de 3 años (septiembre de 2021 - agosto de 2024). Ha sido financiado por la Agencia Estatal de Investigación en el marco del Plan Estatal de Investigación Científica y Técnica y de Innovación 2017-2020.

¿Quieres saber más?
Proyectos Relacionados
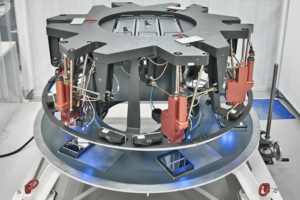
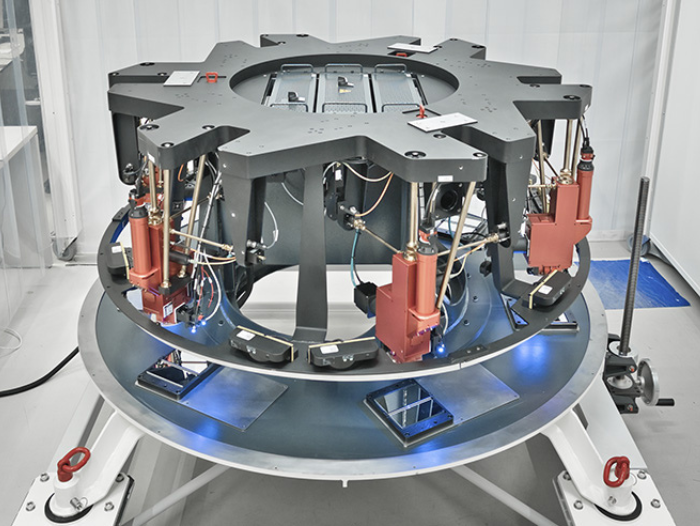
- El Centro de Desarrollo, Instrumentación y Sensores (CD6) de la UPC en Terrassa ha finalizado con la empresa IDOM el diseño y construcción del sistema óptico que se utilizará para calibrar el gran espejo principal, de 39 metros de diámetro, del Extremely Large Telescope (ELT). Será el telescopio terrestre óptico e infrarrojo cercano más grande del mundo y se está construyendo a más de 3.000 metros de altura, en el cerro Armazones, en el desierto de Atacama, en Chile.
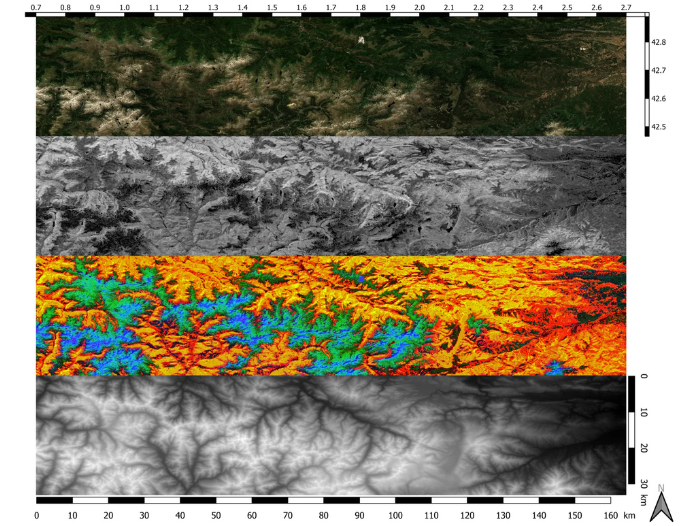
- Un equipo de investigación conjunto de la UPC, integrado por el CommSensLab-UPC, y el ICM-CSIC, participa en el proyecto EO4TIP, que desarrolla nuevas metodologías de observación de la Tierra para detectar puntos de inflexión y cambios repentinos a escala local y regional en la Tierra a partir de datos de satélite de alta resolución.
- Un equipo de investigación de los grupos e-PLASCOM y eb-POLICOM, junto con el Centro de Investigación en Ciencia e Ingeniería Multiescala (CCEM) de la Universitat Politècnica de Catalunya - BarcelonaTech (UPC), participa en el proyecto EcoPolyRub en colaboración con el Centre Català del Plàstic (CCP). La iniciativa tiene como objetivo crear materiales elastoméricos innovadores basados en caucho de neumáticos reciclados, plásticos reciclados y caucho natural para aplicaciones mecánicas y térmicas de alto rendimiento.
- Un equipo de investigación de la UPC, integrado por el CommSensLab-UPC y el Remote Sensing Lab (RSLAB) de la Universitat Politècnica de Catalunya - BarcelonaTech (UPC), junto con el Institut d’Estudis Espacials de Catalunya (IEEC), ha participado en el proyecto AI4EO, con el objetivo de impulsar soluciones y poner en práctica herramientas de inteligencia artificial aplicadas a datos de observación de la Tierra en diversos casos de uso sobre el territorio catalán.


{kind=link}
{kind=link}
{kind=link}
{kind=link}