
Monitoren el soroll submarí per reduir l’impacte de l’activitat pesquera
7 d'octubre de 2021
Finalitza PaperChain: Un model d’economia circular per transformar residus de paper en matèries primeres secundàries
21 d'octubre de 2021L’Àrea Metropolitana de Barcelona necessita pel Pla Director Urbanístic Metropolità (PDU) avaluar la mobilitat generada a l’àmbit de la regió metropolitana regional pels diferents modes de transport i en diferents escenaris de transformació urbana. El PDU és un instrument urbanístic de planejament estratègic i actua com a ròtula entre el planejament territorial del Pla Territorial Metropolità de Barcelona (PTMB) i el planejament general del Pla General Metropolità (PGM). Urbanisme i mobilitat estan directament relacionats: l’organització de la ciutat i els usos del sòl determinen la demanda de transport que alhora condiciona la infraestructura, l’entramat urbà i l’oferta de serveis de transport.

Així mateix, la infraestructura, els serveis de transports i els efectes de la mobilitat a l’entorn urbà influencien els usos del sòl i la forma urbana. El PDU haurà d’integrar la lectura de la mobilitat projectada amb les directrius urbanístiques de la metròpolis del futur.
inLab FIB, a través de CARNET, col·labora amb l’Àrea Metropolitana de Barcelona (AMB) per realitzar la modelització de la demanda per l’avaluació del PDU. Aquest pla avaluarà la mobilitat generada en l’àmbit de la regió metropolitana regional pels diferents modes de transport i en diferents escenaris de transformació urbana.
El projecte s’articula en dues fases. La primera d’elles ha consistit en la creació de la cadena de models de demanda segons l’esquema de les etapes de modelització del mètode de les 4 passes. En la segona fase, s’ha desenvolupat la prognosi de la demanda de mobilitat pels diferents horitzons i escenaris de creixement urbà i de desenvolupament de les infraestructures de transport definits pel PDU.
L’estructura de modelització s’il·lustra en la següent figura.
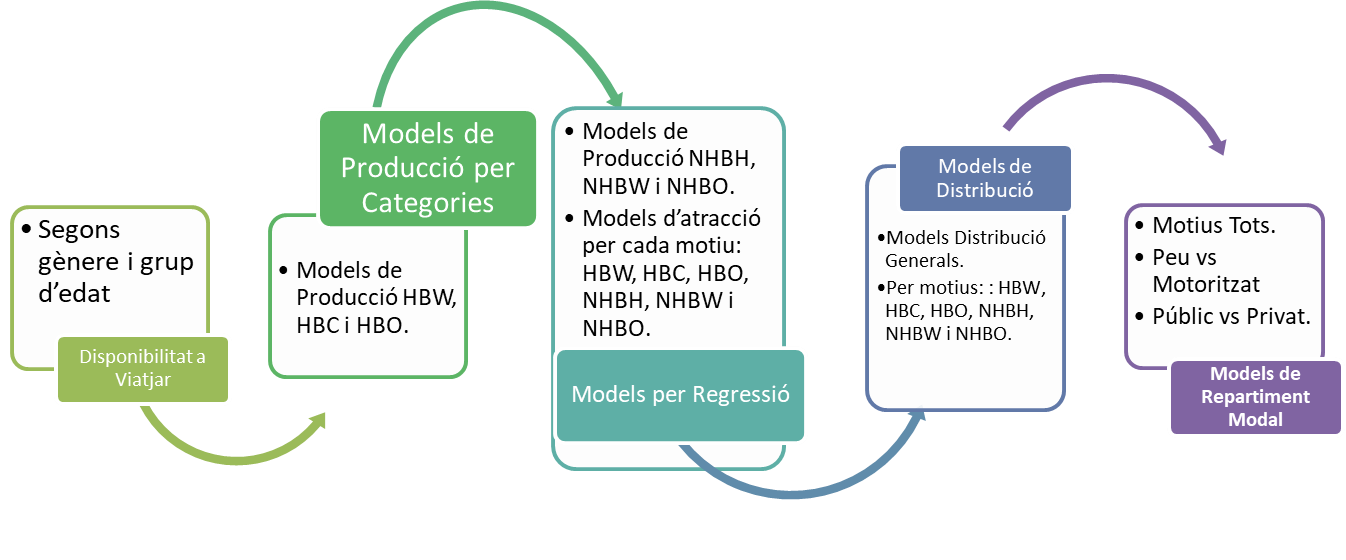
S’han emprat eines de planificació del transport (VISUM, PTV-AG) i software estadístics (RStudio) per l’estimació i validació dels models desenvolupats atenent a les diverses fonts de dades. La fusió i combinació consistent de diverses fonts de dades és un aspecte cabdal en aquest projecte.
Tradicionalment els plans urbanístics s’han desenvolupat sense considerar la demanda de transport induïda per les noves actuacions. Amb la incorporació dels models de demanda en una plataforma de planificació com VISUM de PTV-AG, es podrà modelitzar amb més precisió l’impacte de les diferents actuacions urbanístiques implicades en la implantació del nou Pla Urbanístic Metropolità sobre la xarxa viària i de transport públic de la AMB.
El projecte té una durada de 9 mesos i compta amb un pressupost de 60.000 euros.
Projectes Relacionats
- Investigadors de la Universitat Politècnica de Catalunya - BarcelonaTech (UPC) han desenvolupat una infraestructura única al servei de la UPC, centres de recerca i empreses per a l’experimentació i validació de tecnologies i serveis amb xarxes d’última generació. Aquesta plataforma permet validar solucions 5G en escenaris reals i liderar la recerca cap al 6G, facilitant la transferència de tecnologia al mercat.
- 09/10/2025Project Headerrightno-repeat;left top;;auto20px Els grups de recerca Barcelona Innovative Transportation (BIT), el Centre de Recerca en Automoció i Mobilitat Avançada (CER-AMA) i The Future Mobility Research […]
- Un equip de recerca format pel Barcelona Innovative Transportation (BIT), l’inLab FIB, CARNET Barcelona – Future Mobility Research Hub (CER-AMA) i el Departament d’Arquitectura de Computadors (DAC) de la Universitat Politècnica de Catalunya - BarcelonaTech (UPC) impulsa el projecte i-MovE, que té com a objectiu incorporar dades multisectorials per proporcionar informació de valor molt més precisa per al sector de la mobilitat. El projecte desenvolupa quatre casos d’ús enfocats a empreses i autoritats de la mobilitat tant del transport públic com l’individual, fent servir el demostrador UPCxels.
- El Centre de Recerca en Supervisió, Seguretat i Control Automàtic (CS2AC-UPC) de la Universitat Politècnica de Catalunya - BarcelonaTech (UPC) ha coordinat el projecte SaCoAV, centrat en la recerca de nous mètodes i eines per garantir la coordinació segura de vehicles autònoms en entorns urbans.




{kind=link}
{kind=link}
{kind=link}
{kind=link}